




Attitude mjitting systeem




Produkteigenskippen
MS-100A0 is in trije-graden-fan-frijheid hâlding basearre op mikro-meganyske technology (MEMS)
Mjitsysteem, ynboude MEMS-gyroscoop mei hege prestaasjes en MEMS-versnellingsmeter, troch it filteralgoritme berekkent de toanhichtehoek, rolhoek en koershoek fan 'e drager yn realtime.ek opsjoneel matched mei in magnetometer te berikken hege-precision noarden finding, en útfier 3-as hoeksnelheid en 3-as fersnelling wurdt brûkt foar beweging kontrôle.
Produkt Characteristic
- Better dan 0,1 ° hâldingsnauwkeurigheid
- Attitude mjitting berik ± 90 °
- Bedriuwstemperatuerberik: -40 ~ 65 ℃
- Trillingsomjouwing: 10~2000Hz, 6g (RMS)
- Rike ynterfacetypen, stipe RS232, RS422, CAN en oare standert ynterfaces
- Wetterdicht sealûntwerp
Elektryske skaaimerken
- Netzteil: 5V (typ.), Oanpasbere brede spanning ynfier 12 ~ 36V
- Nominearre krêft: 0.5W (max)
Ripple: 100mV (peak-to-peak)
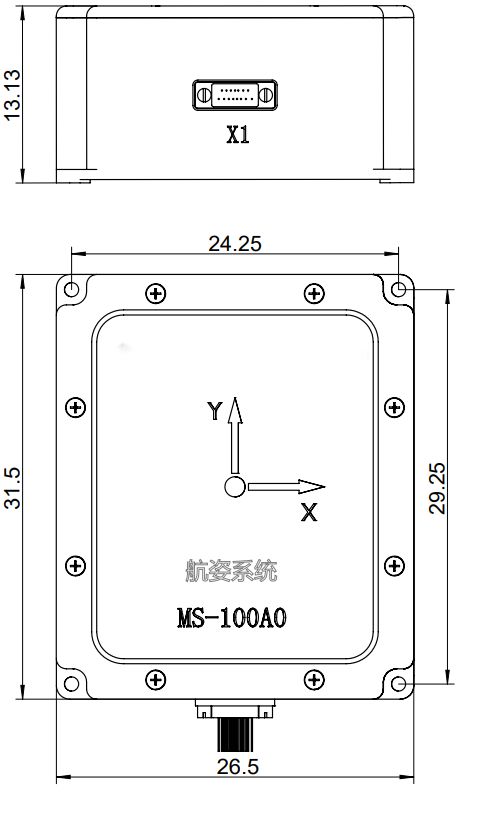
Meganyske Ofmjittings
Technyske yndikatoaren
| Gyro parameters | ||||
| Parameter |
Test Betingsten | Typyske wearde |
Max wearde | Ienheid |
| Dynamysk mjitberik |
|
| 450 | º/s |
| Nul bias stabiliteit | Allan fariânsje, Z-as | 0.8 |
| º/h |
| Allan fariânsje, X-as en Y-as | 1.6 |
| º/h | |
| 10s gemiddelde, X, Y-as (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 6 |
| º/h | |
| 1s gemiddelde, X, Y-as (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 9 |
| º/h | |
| Nul offset | Nul offset berik | ±0,2 |
| º/s |
| Nul foaroardielen feroarje oer it folsleine temperatuerberik | ±0.06 |
| º/s | |
| Start-to-start repeatability | 0.006 |
| º/s | |
| Deistich begjinne werhelling | 0.009 |
| º/s | |
| Ynfloed fan lineêre fersnelling op nul bias | 0.002 |
| º/s | |
| De ynfloed fan trilling op nul offset, de feroaring foar en nei trilling | 0.002 |
| º/s | |
| De ynfloed fan trilling op nul offset, de feroaring foar trilling | 0.002 |
| º/s | |
| Skaalfaktor | Skaalfaktornoyaktighet, Z-as | 0.3 |
| % |
| Skaalfaktornoyaktighet, X, Y-as | 0.6 |
| % | |
| Skaalfaktor netlineariteit, Z-as | 0.01 |
| %FS | |
| Skaalfaktor netlineariteit, X, Y-as | 0.02 |
| %FS | |
| Hoek willekeurige kuier |
| 0.001 |
| °/√hr |
|
Noise tichtens |
| 0.001 |
| °/s/√hr |
| Resolúsje |
| 3.052×10-7 |
| º/s/LSB |
| Bânbreedte |
| 200 |
| Hz |
| Accelerometer parameters | ||||
| Parameter |
Test betingsten |
Typyske wearde | Max wearde | Ienheid |
| Dynamysk mjitberik |
| 16 |
| g |
| Nul bias stabiliteit | Allan fariânsje | 0.03 |
| mg |
| 10s gemiddelde (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 0.2 |
| mg | |
| 1s gemiddeld (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 0..3 |
| mg | |
| Nul offset | Nul offset berik | 5 |
| mg |
|
Nul offset fariaasje (peak-to-peak) oer it folsleine temperatuerberik | 5 |
| mg | |
| Start-to-start repeatability | 0.5 |
| mg | |
| Deistich begjinne werhelling | 0.8 |
| mg | |
| Zero Bias Temperatur Koëffisjint | 0.05 | 0.1 | mg/℃ | |
| Skaalfaktor | Skaalfaktor accuracy | 0.5 |
| % |
| Skaalfaktor netlineariteit | 0.1 |
| %FS | |
| Speed willekeurige kuier |
| 0.029 |
| m/s/√hr |
| Noise tichtens |
| 0.025 |
| mg/√Hz |
| Resolúsje |
| 1.221×10-8 |
| g/LSB |
| Bânbreedte |
| 200 |
| Hz |
| Magnetometerparameters (opsjoneel) | ||||
| Parameter | Test betingsten |
Typyske wearde | Max wearde |
Ienheid |
| Dynamysk mjitberik |
| 2.5 |
| gauss |
| Nul offset | Non-magnetyske omjouwing | 15 |
| mgauss |
| Heading krektens | ||||
| Magnetyske heading accuracy |
| 0.5 |
| ° |
| Horizontale hâlding accuracy | ||||
|
Pitch hoek accuracy |
| 0.1 |
| ° |
| Roll hoek accuracy |
| 0.1 |
| ° |
| Gyro parameters | ||||
| Parameter |
Test Betingsten | Typyske wearde |
Max wearde | Ienheid |
| Dynamysk mjitberik |
|
| 450 | º/s |
| Nul bias stabiliteit | Allan fariânsje, Z-as | 0.8 |
| º/h |
| Allan fariânsje, X-as en Y-as | 1.6 |
| º/h | |
| 10s gemiddelde, X, Y-as (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 6 |
| º/h | |
| 1s gemiddelde, X, Y-as (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 9 |
| º/h | |
| Nul offset | Nul offset berik | ±0,2 |
| º/s |
| Nul foaroardielen feroarje oer it folsleine temperatuerberik | ±0.06 |
| º/s | |
| Start-to-start repeatability | 0.006 |
| º/s | |
| Deistich begjinne werhelling | 0.009 |
| º/s | |
| Ynfloed fan lineêre fersnelling op nul bias | 0.002 |
| º/s | |
| De ynfloed fan trilling op nul offset, de feroaring foar en nei trilling | 0.002 |
| º/s | |
| De ynfloed fan trilling op nul offset, de feroaring foar trilling | 0.002 |
| º/s | |
| Skaalfaktor | Skaalfaktornoyaktighet, Z-as | 0.3 |
| % |
| Skaalfaktornoyaktighet, X, Y-as | 0.6 |
| % | |
| Skaalfaktor netlineariteit, Z-as | 0.01 |
| %FS | |
| Skaalfaktor netlineariteit, X, Y-as | 0.02 |
| %FS | |
| Hoek willekeurige kuier |
| 0.001 |
| °/√hr |
|
Noise tichtens |
| 0.001 |
| °/s/√hr |
| Resolúsje |
| 3.052×10-7 |
| º/s/LSB |
| Bânbreedte |
| 200 |
| Hz |
| Accelerometer parameters | ||||
| Parameter |
Test betingsten |
Typyske wearde | Max wearde | Ienheid |
| Dynamysk mjitberik |
| 16 |
| g |
| Nul bias stabiliteit | Allan fariânsje | 0.03 |
| mg |
| 10s gemiddelde (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 0.2 |
| mg | |
| 1s gemiddeld (-40 ℃ ~ + 80 ℃, konstante temperatuer) | 0..3 |
| mg | |
| Nul offset | Nul offset berik | 5 |
| mg |
|
Nul offset fariaasje (peak-to-peak) oer it folsleine temperatuerberik | 5 |
| mg | |
| Start-to-start repeatability | 0.5 |
| mg | |
| Deistich begjinne werhelling | 0.8 |
| mg | |
| Zero Bias Temperatur Koëffisjint | 0.05 | 0.1 | mg/℃ | |
| Skaalfaktor | Skaalfaktor accuracy | 0.5 |
| % |
| Skaalfaktor netlineariteit | 0.1 |
| %FS | |
| Speed willekeurige kuier |
| 0.029 |
| m/s/√hr |
| Noise tichtens |
| 0.025 |
| mg/√Hz |
| Resolúsje |
| 1.221×10-8 |
| g/LSB |
| Bânbreedte |
| 200 |
| Hz |
| Magnetometerparameters (opsjoneel) | ||||
| Parameter | Test betingsten |
Typyske wearde | Max wearde |
Ienheid |
| Dynamysk mjitberik |
| 2.5 |
| gauss |
| Nul offset | Non-magnetyske omjouwing | 15 |
| mgauss |
| Heading krektens | ||||
| Magnetyske heading accuracy |
| 0.5 |
| ° |
| Horizontale hâlding accuracy | ||||
|
Pitch hoek accuracy |
| 0.1 |
| ° |
| Roll hoek accuracy |
| 0.1 |
| ° |


